
现代湿度测量方法评述
发布时间:2017-11-22
引言
湿度是一个重要的物理量,在过程控制、质量控制、能源利用、健康及安全等诸多领域都扮演着重要的角色,特别是许多高科技领域,如半导体制造、制药、电力和通讯等,对湿度测量的要求越来越高。随着科学技术的发展,现代湿度测量技术有了长足的进步。从传统的干湿球法、露点法、电解法到各种电湿度测量方法再到吸收光谱法,各种方法不断完善、成熟,逐渐应用到了不同的湿度测量领域中,湿度测量正向着更快捷、更准确、更灵敏的方向发展。本文主要讨论露点法、电湿度传感器和吸收光谱法。
1露点法
露点法是一种传统的湿度测量方法,其理论基础是:在气体和水汽都遵循理想气体定律的条件下,湿空气在冷却过程中水汽分压保持不变。从经典的Regnault露点仪算起,露点法已经有一百多年的历史了,但是,在现代湿度测量中露点法仍然占有重要的地位[1]。露点仪的设计过程中主要涉及以下几个关键问题:制冷方法、露点温度测量方法和露的检出方法。热电制冷是露点仪中普遍采用的制冷方法,其原理是利用半导体的帕尔帖效应。目前采用五级制冷的露点仪最低露点检测温度可以达到-80℃,制冷元件的热端一般采用水冷的方式,如果制冷元件的热端采用压缩机制冷,露点检测温度可以进一步扩展到-100℃。
在现代露点仪中,露点温度测量主要是采用铂电阻感温元件,它在相当宽的温度范围内阻值和温度近于线性关系,稳定性好,输出信号强,由于体积相对较大,为减小温度梯度的影响,在结构设计上应给予充分注意。
露的检出方法主要有三种:一是电学方法;二是光学方法;三是声表面波法。早期的露点仪主要采用电学方法,其原理是利用冷凝面上表面电阻的变化来测量露点温度;随着光电技术的发展,光学方法得到了广泛的应用,利用冷凝面对入射光的反射和散射可以准确地测量露点温度;近年来,表面声波技术在露点测量领域中的应用也逐渐成熟起来。下面介绍两种较为常用的露点仪:光电式露点仪和声表面波露点仪。
1.1光电式露点仪(Chilled-Mirror Hygrometer)
现代光电式露点仪的测量原理如图1所示,测量室中有两对发光二极管和光电探测器,其中一路作为参考信号,另一路用来检测镜面的散射光。当镜面温度高于被测气体的露点温度时,镜面上没有露(霜)层形成,反射率很高,电桥处于不平衡状态,此时输出的信号通过功率放大控制热电制冷器;随着镜面温度下降,达到被测气体的露(霜)点温度后,在镜面上就会形成露(霜)层,光线将会在镜面上发生散射,电桥从不平衡趋向平衡状态,通过反馈控制系统调节镜面的温度,将冷凝在镜面上的露(霜)层控制在一定的厚度范围内,当被测气体中水汽的冷凝速度和镜面上露(霜)层的蒸发速度达到平衡状态后,测量此时的镜面温度,就是被测气体的露点温度。
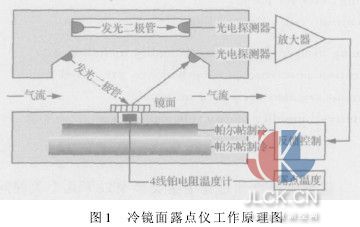
结合先进的数字控制、镜面污染自动补偿等技术,现代光电式露点仪的测量最大允许误差可以达到±0.1℃。它不仅可以用于一般的工业测量领域,长期以来还被普遍用作标准仪器。
1.2声表面波露点仪(SAW Hygrometer)
1800年,瑞利发现了一种特殊类型的表面波,命名为声表面波(Surface Acoustic Wave)[2]。随着微型电子电路制造工业的发展,人们利用声表面波的特性研制出了声表面波传感器,传感器中集成了机械波发射电路、探测电路和先进的信号处理电路,被看作是最早的微机电系统之一。声表面波传感器属于质量传感器的一种,可用于测量温度、压力、加速度、应变等物理量和湿度、有害气体、生物材料等化学量,1978年,Das等首先将声表面波传感器用于压力测量[3], 1979年,Wohltjen将其用于薄膜特性测量[4]。
声表面波传感器的结构原理如图2所示。传感器主体是利用光刻技术在金属薄膜上蚀刻而成的两个金属叉指式换能器(IDTs),放置在压电石英基座上。输入的射频信号通过反向压电效应产生声表面波,加载到IDTs的输入端,声表面波通过延迟通道到达IDTs的输出端,声表面波信号被转换成电信号,就可以得到声波的频率和振幅信息。当传感器表面上有附着物时,传感器质量的变化就会引起声波频率和振幅的变化,这就是声表面波传感器的工作原理。

声表面波传感器最早应用于露点测量是在1983年,当时其测量准确度和分辨力都无法和光电式露点仪相比,直到1995年,Galipeau等才利用声表面波传感器准确测量了露点温度[5]。
声表面波露点仪的工作原理如图3所示。当传感器表面没有露(霜)层时,声表面波没有变化;随着温度的降低,当传感器表面有露(霜)形成后,就会引起声表面波的变化。通过分析接收到的声表面波信号的频率和振幅,控制帕尔帖致冷器调节传感器表面的温度,使得水汽的冷凝速度和露(霜)层的蒸发速度达到平衡状态,在传感器表面形成一层均匀的露(霜),由铂电阻温度计即可测得气体的露点温度。

由于露和霜的结构有所不同,通过分析接收到的声表面波信号,声表面波传感器可以准确地识别露和霜,从而避免由于过冷水现象而引起的测量偏差。另外,声表面波传感器对于灰尘的影响具有很好抑制作用,由于灰尘不同于水(冰),它和传感器表面的接触面积很小,因此对于声表面波的衰减和散射作用几乎可以忽略。
2电湿度传感器
电湿度传感器主要可以分为电阻式和电容式两大类。
电阻式湿度传感器常用的湿敏材料有氯化锂、氧化镁复合氧化物、四氧化三铁、半导体陶瓷等,如ZnO-LiO2-V2O5系、Si-Na2O-V2O5系、TiO2-MgO-Cr2O3系等,它是利用水分子的吸附活性来改变材料的电阻率进行测量的。其主要优点是灵敏度高,但是大多数电阻式湿度传感器都存在稳定性差的问题,主要是因为湿敏材料长期与水汽接触,造成水分子被湿敏材料吸附(主要是化学吸附),从而引起传感器的漂移。电容式湿度传感器一般是采用高分子薄膜电容制成,按感湿薄膜材料的类型可分为有机高分子薄膜湿敏器件和无机薄膜湿敏器件两大类。常用的有机高分子薄膜材料有聚酰亚胺、聚苯乙烯、乙酸-乙酸纤维等,无机高分子薄膜材料有氧化铝、五氧化二钽等。当湿度发生改变时,高分子薄膜电容的介电常数发生变化从而引起电容量的变化。电容式湿度传感器的优点是产品互换性好、响应速度快、便于制造、容易实现小型化和集成化,是目前广泛使用的湿度传感器。
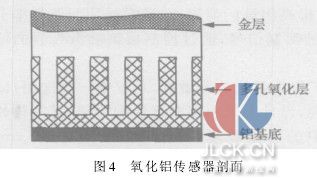
下面以氧化铝湿度传感器为例说明电容式湿度传感器的基本结构和工作原理。图4为氧化铝湿度传感器的剖面图,首先将铝叉指结构经过阳极氧化处理后形成多孔氧化层,在氧化层上蒸镀很薄的金层,这样铝基底和金层之间就形成一对电极,当水汽穿过金层在多孔氧化铝层上达到平衡时,其介电常数就会发生变化从而引起电容的变化,电容量的大小可根据公式计算得到。在一定的压力和温度下,电容的变化和湿度直接相关,大多数的氧化铝传感器与露点温度呈线性响应。由于氧化铝薄膜与吸附的水汽作用会生成Al(OH)3,因此这类传感器的稳定性较差,漂移非常明显。五氧化二钽薄膜与氧化铝薄膜相比稳定性要好的多。
目前,采用有机高分子薄膜的电容式湿度传感器是主要的发展方向,其中聚酰亚胺高分子薄膜是一种比较理想的感湿材料,主要具有以下优点:①稳定性好。研究表明,这种材料基本不发生对水分子的化学吸附,比较少或没有发现水分子在材料表面的氢键吸附;这些材料中水分子的行为基本与空气中的自由水分子相同。因此,用这些材料制成的电容型湿度传感器不但响应速度快,而且长期稳定性好。②耐高温。由于这些材料高温时的机械、介电性能十分稳定,因此可以在200℃以下环境温度中使用。③易于集成。这类传感器的制作工艺与硅平面工艺相容,因此可以与其它传感器(如温度传感器等)集成在同一芯片上[6]。
3吸收光谱法
吸收光谱法是现代湿度测量中的一项重要技术,包括红外吸收和紫外吸收。目前基于近红外吸收光谱的测量技术已日趋成熟,其测量的准确度、灵敏度和测量范围都超过了传统的露点法。
分子在近红外光谱区内的吸收产生于分子振动或转动的状态变化或分子振动或转动状态在不同能级间的跃迁,吸收主要由含氢化学基团的振动的泛频(对应于分子振动状态在相隔一个或几个振动能级之间的跃迁)和组频(对应于分子两种振动状态的能级同时发生跃迁)所致,这些化学基团有:甲基、亚甲基、次甲基、芳基、羟基、氨基等,水分子中的羟基在近红外光谱区中就有两个主要的吸收带。
根据吸收光谱理论,一束入射强度为I0的光,穿过一定长度的被测气体,其透射光I的强度遵循比尔定律,可表示为
I=I0e-σ(ν)Nd
式中:σ(ν)为被测气体的吸收系数,吸收系数为频率的函数,不同的物质分子在近红外光谱区域内有特定的吸收截面;d为光穿过被测气体的有效长度;N为气体的分子数密度(气体浓度)。在一定的波长下,知道了吸收系数就可以测得水汽浓度。
下面介绍两种基于近红外吸收光谱的测量方法:激光二极管谐振衰减光谱法(CRDS)和可调谐激光二极管吸收光谱法(TLDAS)。
3.1激光二极管谐振衰减光谱法
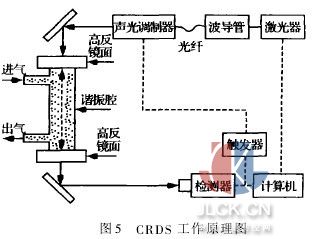
1988年,O' Keefe和Deacon首先提出了CRDS的基本工作原理,其核心思想是通过测量时间而不是光强来测定物质的光学吸收[7],因此,相对于许多传统的吸收光谱技术CRDS具有独一无二的优点。如图5所示,CRDS的结构非常简单,其光学部分主要有激光器、光学谐振腔和光电检测器。光学谐振腔由两个镜面反射率大于99.999%的石英镀膜反射镜组成。激光入射到谐振腔后,经过一段时间后切断光源,入射到谐振腔内的激光在两个高反镜面之间来回反射,其中有一小部分穿过反射镜出射到光电检测器,激光光强的衰减速率和镜面的反射、散射以及气体的吸收有关。由于反射和散射引起的光损耗非常低,激光光强的衰减速率主要和谐振腔内气体的吸收有关。
当谐振腔内的气体对于选择的波长没有吸收时,振荡衰减的时间常数主要取决于镜面的反射率,即

式中:d为谐振腔两镜面之间的距离;R为镜面的反射率;c为光速。
当选择波长和谐振腔内气体的峰值吸收波长相同时,振荡衰减的时间常数依据比尔定律由下式决定:

式中:d为谐振腔两镜面之间的距离;R为镜面的反射率;σ(ν)为被测气体的吸收系数;N为气体浓度。
于是可以得到:
由此可见,在已知吸收系数的条件下,根据两次测量得到的时间常数就可以得到气体的水汽浓度,这就是CRDS测量湿度的基本原理。
目前,CRDS的光源一般采用连续式二极管激光器,相对于脉冲激光器而言具有更好的重复性、更高的光谱分辨力,但是测量过程入射到谐振腔内的必须是脉冲激光,这样才能够测定振荡衰减的时间常数,因此系统中采用了声光调制器,可以快速控制入射到谐振腔内激光的方向。
当镜面的反射率为99.999%时,对于一个1 m长的谐振腔,在测量过程中激光经多次反射所经过的有效光程可以达到谐振腔长度的105倍,即100000 m,依据比尔定律,系统可以实现非常高的测量灵敏度,其测量露点温度最低可以到-120℃。此外,CRDS还具有快速响应的特性,每次测量所需的时间约为100 ms,由于谐振腔的结构简单,体积小,保证了气体的快速置换,所以CRDS非常适合于在线测量。
3.2可调谐激光二极管吸收光谱法
TDLAS是一种相对比较成熟的吸收光谱测量技术,目前已经用于微量水分测量领域,具有灵敏度高、响应速度快等优点。
TDLAS的工作原理如图6所示,光源采用分布反馈式可调谐二极管激光器,从激光器发出的光经过分光镜分成两路,其中一路作为参考光,另一路作为测量光。参考光穿过参考样品池后到达检测器,信号经解调反馈到激光控制器,用于提高激光输出波长的稳定性;测量光经过测量样品池后到达检测器,信号经解调后可以得到所需的测量信号,这样通过两路信号可以消除样品池外残留气体的影响。
当被测气体的浓度比较低时,其吸收非常微弱,这时激光器的噪音会严重影响测量结果,而在噪音中占主导地位是“1/f”噪音,它随着频率的增加而减弱,因此,为了提高测量的信噪比,通常采用两路频率分别为Ω和ω的调制信号,通过控制器调制激光器的输出波长。
为了提高系统的灵敏度,系统中一般选用Herriott型样品池,设计上采用多次反射的原理,其结构相对于CRDS中的谐振腔复杂的多,对于一个30 cm长的Herriott型样品池,在测量过程中激光经多次反射所经过的有效光程可以达到样品池长度的30~50倍[8]。结合双光路技术、波长调制技术和Herriott型样品池,TDLAS测量露点温度最低可以到-110℃[9]。
4总结
综上所述,用于湿度测量的原理、方法非常多,加深对各种测量方法的了解,有利于我们针对不同的测量领域选择合适的测量仪器。本文涉及到的三种测量方法在目前湿度测量领域都有着广泛的应用,其中露点法测量准确度高,但响应速度比较慢,一般作为实验室仪器使用,电湿度传感器价格低廉,应用范围最广,依据其感湿材料和结构形式的不同,既可用于常规的相对湿度测量,也可以用于微量水分的测量,吸收光谱法是近年来随着半导体技术的发展而逐渐新兴起来的测量方法,其测量范围宽,速度快,准确度高,但高昂的价格是制约其发展的瓶颈。除此之外,用于湿度测量的方法还有诸如重力法、质谱法、微波吸收法、傅立叶变化红外光谱法等等,其中有些适用范围有限,有些技术尚未成熟,相信随着技术的进步发展,还会有更好更新的湿度测量方法涌现出来。
摘自:中国计量测控网




