
首页>技术中心>技术资讯>基于虚拟仪器的质量流量计相位差测量
基于虚拟仪器的质量流量计相位差测量
发布时间:2017-11-22
引言
质量流量计是一种直接测量流体质量流量的仪器,它是通过检测两路同频信号的相位差,从而利用相应的数学公式计算出流体的质量流量。传统电子模拟式相位差测量由硬件电路完成,电路的温漂、噪声及干扰信号的影响,都会导致测量结果产生误差[1-2]。随着计算机技术和虚拟仪器技术的发展,利用虚拟仪器可以很好的完成相位差的测量,同时避免用硬件电路测量时所带来的一些影响,从而提高测量精度。
虚拟仪器相位差测量常用的方法有:过零法、相关法、频谱分析法等[3-7]。由于传感器输出的信号是频率和幅值不断变化的近似正弦脉冲波的信号,用相关法和频谱分析法不能很好的测量相位差,而用传统的过零法虽能测量相位差,但对于实际信号零点的查找比较困难,针对传感器输出的实际信号,本文提出了一种基于虚拟仪器的改进型过零点相位差测量法。
1虚拟仪器相位差测量系统
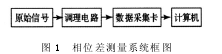
虚拟相位差测量系统由传感器、信号调理电路、数据采集卡、计算机等几部分组成。系统框图如图1所示。其中计算机平台通过LabVIEW编程控制数据采集卡采集信号,并对采集进来的数字信号进行一系列处理,完成相位差的测量。
2过零法原理
2.1测量原理[3-5]
过零法是通过计算2个同频信号过零时刻的时间差,再将时间差转换为相位差。其基本原理如图2所示。

3改进的过零法原理
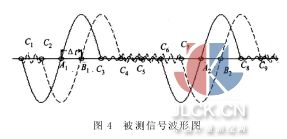
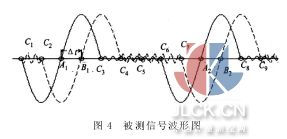
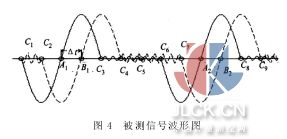
用前面的过零法能够很好的测量常见波形的相位差,但对实际工作中遇到的信号如图4所示,过零法不能很好的判断实际计算需要的过零点,因而不能测量出相位差。针对这种情况,提出了一种设定阈值的过零点相位差测量法。
3.1测量原理
测量的基本原理与前面所述基本相同,就是计算2个同频信号过零时刻的时间差,再将时间差转换为相位差。而在虚拟仪器中,两同频信号过零时刻的时间差,是由两过零点所在数组中对应位置差来确定的。所以前面的计算公式可以转化为:
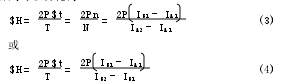
式中:Δθ为两信号的相位差,IA1为过零点A1在数组1中所对应的位置(即该点在数组1中的索引值),IA2为过零点A2在数组1中所对应的位置(即该点在数组1中的索引值),IB1为过零点B1在数组2中所对应的位置(即该点在数组2中的索引值),IB2为过零点B2在数组2中所对应的位置(即该点在数组2中的索引值)。数组1和数组2分别为数据采集卡采集进来的2路信号A、B的数值,采集卡应使用并行采集卡,保证同时采集而无时间差,否则应对结果进行修正。
3.2设定阈值的过零点判断
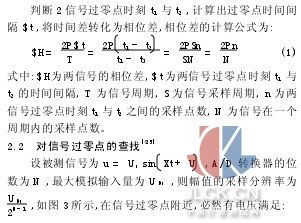
如图5所示,信号中A1、A2、B1、B2四个过零点为计算需要的零点,而其它过零点为干扰点。如果直接进行过零点查找并计算,则会连同干扰点一并计算,出现测量错误。因此,进行零点查找判断时,应预先设定一阈值δ,由于信号的幅值是变化的,而且在正弦脉冲之间的跳动值也是变化的,因此,阈值δ的设定应满足以下2个条件:(1)阈值应大于信号脉冲在波谷处的最大值Umax(即波谷处绝对值最小的一个);(2)阈值应小于信号在干扰段处的最小值Umin(即在干扰为负数时候绝对值最大的一个)。图5中,只有阈值2为正确的设定值。阈值设定公式为:Umax<δ
3.3相位差移位计算
通过零点查找找到所需零点在数组中的索引值后,由式(3)或者式(4)可以计算出2路信号的相位差。

但是,当出现如下2种的情况:(1)如图7(a)所示,采集进来的A路信号的第1个零点A1之前的值都大于阈值,因此算法找不到A1点,而查找到的第1个零点实际上是数组中1的第2个零点A2。而在B路信号的第1个零点B1之前可以找到阈值,因此能够找到数组2的第1个零点B1。(2)如图7(b)所示,采集进来的A路信号的零点是从A2开始的,而B路信号的零点从B1开始的。此时,如果用式(3)或式(4)计算相位差,会出现错误.。
因此,当判断出现上述2种情况后(即查找到的A路信号的第1个零点在数组中1中的索引值大于查找到的B路信号的一个零点在数组2中的索引值时),应该用查找到的B路信号的第2个零点与查找到的A路信号的第1个零点为一组进行计算,即把查找到的B路信号的零点依次向前移位来与A路信号的零点配对计算。因为在质量流量计输出信号中,A路信号总时超前于B路信号。其计算公式变为:
式中:Δθ为两信号的相位差,IA1为查找到的A路信号第一个过零点在数组1中所对应的位置(即该点在数组1中的索引值),IA2为查找到的A路信号第2个过零点在数组中1中所对应的位置(即该点在数组1中的索引值),IB1为查找到的B路信号第1个过零点在数组2中所对应的位置(即该点在数组2中的索引值),IB2为查找到的B路信号第2个过零点在数组中2中所对应的位置(即该点在数组2中的索引值)。
因为质量流量计的主动轮和质量感受轮一周分别安装了8个磁铁,所以信号的一个脉冲(一个周期)只相当于轮子转动了八分之一周,即实际的相位差只为求出的相位差Δθ的八分之一。质量流量计实际产生的相位差为:Δφ=Δθ/8。
4误差分析
4.1由传感器本身带来的误差
质量流量计的主动轮和质量感受轮一周分别安装了8个磁铁,由于存在磁铁安装不均匀,磁铁不是在同一圆周上和轮子旋转时的偏心等,由此带来的误差是按一定规律变化的。对于此种误差,可以通过对每8(或者8的整数倍)个相位差求平均加以消除。
式中:k为正整数,k的取值根据实际情况确定。传感器安装时,由于前后磁铁没有对齐而造成的初始相位差,可以通过把求得的相位差减去初始相位差得到流量计实际的相位差。
4.2由硬件设备带来的误差[8]
数字过零法的误差还与数据采集卡的位数、信号的采样频率以及信号的干扰因素等有关[4-5]。一般来说数据采集卡的位数越大,所测量的相位差越精确;数据采集卡的采样频率越高,所测量的相位差越精确。因此应在一定的条件下,尽量选用位数大,采样频率高的采集卡。另外,由于信号受到干扰也会影响测量精度,常出现无法消除的粗大误差,因此,在进行相位差测量之前还应该对信号进行数字滤波。因为对相位信息有要求,所以选用FIR滤波器,因为FIR滤波器的相频响应是线性的,可以防止时域数据发生畸变[9]。
5实验结果
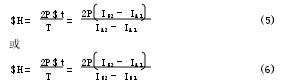
利用此方法对研制的质量流量计进行实际测量时,从示波器观察各个阶段的波形,如图8所示,图中上半部分为没有滤波之前的信号,下半部分为经过FIR滤波器滤波后的信号,可以看出利用FIR滤波器能很好的调理信号,滤除干扰信号。
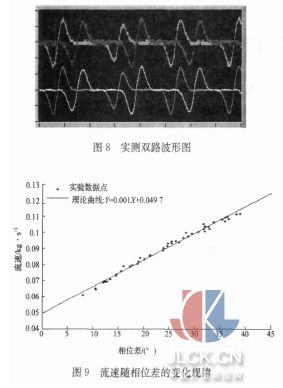
实验数据如图9所示,分析可得:流速随相位差的变化近似为一条直线,满足理论分析;实验结果表明,该系统具有很好的线性性能。相位差测量误差也满足测量要求,传感器测得的质量流量精度达到1%。
6结论
本文从基于虚拟仪器的相位差测量方法入手,针对工程中的实际信号,结合传统的过零法,提出了一种设定阈值的改进型过零法,该方法能很好的测量实际工程中频率变化信号的相位差,达到需要的精度要求。但是,如果要获得更高的精度,在以后的测量中应选用位数更高的数据采集卡。综上所述,本文提出的基于虚拟仪器的改进型过零法,简单易行,效果显著,成本低廉,在实际工程测量中有很高的实用价值。
摘自:中国计量测控网




