基于新型压电驱动器的激光扫描器
发布时间:2017-09-01
引言
激光扫描器,如多面转镜扫描器、振镜扫描器(检流计式)、音圈电机扫描器和压电扫描器等,在激光加工、激光投影、激光电视、生物医学、半导体工艺、激光雷达等领域中获得了广泛的应用。多面转镜扫描器虽然具有扫描速度快、扫描角度大、回扫快和速度稳定性高等优点,但也有半径差引起的非线性误差和各小面不平行度引起的塔形误差,会影响扫描精度[1]。振镜扫描器在高频扫描(几百赫兹以上)时,扫描最大角度和线性度都会严重下降。另外,上述两种扫描器都有转动惯量大、功耗大、有摩擦等缺点,难以实现高速灵巧扫描,在空间领域应用也受限。音圈电机扫描器[2]扫描角度较大,但是扫描频率较低,功耗较大。
传统的压电光学扫描器[3]采用压电陶瓷驱动器直接驱动,多用于自适应光学补偿,扫描器频率较高,但是由于压电陶瓷驱动位移量小, 导致扫描角度小,限制了在其他领域的应用。为了弥补压电陶瓷驱动位移量小的缺点, 国内外研究者设计了多种位移放大结构,主要采用杠杆放大原理,在多种微位移驱动机构里得到了应用。杠杆式的位移放大机构放大率高,但是谐振频率不高,影响其高频动态应用。
在激光雷达等领域,通常希望激光光束以高频率匀速扫描(即三角波扫描),而上述激光扫描器很难达到这种要求。为此,文中基于新型的弹性外壳式位移放大压电驱动结构[4-7],设计了一种高性能的激光扫描器(以下简称扫描器),该驱动结构具有比杠杆式压电驱动结构更好的高频动态特性,可以实现比传统压电扫描器大的扫描角度和较高的扫描频率,通过软件补偿和串联硬件陷波器相结合的开环控制方法,补偿压电陶瓷迟滞效应影响和抑制机械谐振,提高了扫描线性度,实现了高频匀速扫描。文中详细介绍了新型位移放大压电驱动结构和新型激光扫描器的工作原理,对其进行了模拟分析,介绍了扫描器的驱动控制方法,并对扫描器进行了性能测试。
1 新型位移放大压电驱动器的工作原理
新型位移放大压电驱动器由压电陶瓷叠堆和弹性外框组成, 弹性外框采用弹簧钢60Si2Mn 制作,压电陶瓷叠堆驱动器在一定的预紧力作用下卡在弹性外框内,其结构和工作原理如图1 所示。当给压电陶瓷施加正电压时,压电陶瓷会伸长,迫使弹性外框变形,在与压电陶瓷伸长方向垂直的方向上缩短。因此,位移放大压电驱动器可将压电陶瓷在横向的伸长运动转化为纵向的缩短运动,缩短的位移量按照一定比例放大。将驱动器近似为一个椭圆,位移放大率A 与驱动器的长短轴之比近似成正比:A=a/b (1)
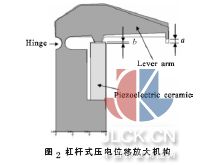
式中:a 为放大端的位移量;b 为压电陶瓷的驱动位移量。位移放大的驱动器改善了普通压电陶瓷驱动器位移量很小的缺点,将其位移量成倍地放大。传统的杠杆式位移放大压电驱动结构也可以将压电陶瓷的位移进行放大,其结构如图2 所示,其位移放大率同样如公式(1)所示。
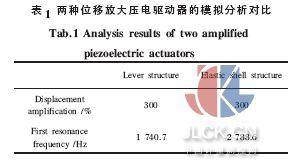
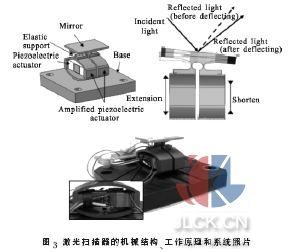
为了比较两种放大结构的动态性能,分别设计了两种类型的放大结构, 外框材料都采用60Si2Mn,压电陶瓷尺寸都为5 mm×5 mm×18 mm,其位移放大率相同,用有限元分析软件ANSYS 分析了其位移放大率和模态频率,结果如表1 所示,可以发现:采用弹性外框的位移放大器的一阶固有频率比杠杆式位移放大器高很多,因此,更适合做高频驱动。对图3 所示扫描器中的驱动器实物进行无负载输出位移量测试,在100 VDC 电压下,输出位移量为40 μm,为压电陶瓷位移量15 μm 的2.7 倍, 稍小于设计的3 倍放大率,主要原因是部分电压用于克服压电陶瓷两端的压力。
2 激光扫描器的工作原理
扫描器采用一对位移放大的压电驱动器作为驱动器件,驱动器底部固定于底座上,弹性铰链镜架通过两个弹性铰链连接于两个驱动器上方, 镜架上粘有反射镜片。在平衡状态时(即扫描零位),两个驱动器分别加载相同的电压。当两个驱动器的加载电压分别增大和减小时, 驱动器就会分别做缩短和伸长运动( 相对于平衡状态),可带动连接于其上的弹性铰链镜架和反射镜做偏转摆动, 从而实现光束的偏转扫描。扫描器的机械结构、工作原理和系统实物照片如图3 所示。
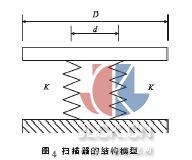
对扫描器结构模型进行适当简化,将位移放大压电驱动器和弹性铰链视为弹簧,则扫描器机械结构模型如图4 所示。系统的角自振频率为:

式中:K 为位移放大压电驱动器和弹性铰链的等效弹性系数;d 为铰链中心距;D 为反射镜口径;m 为反射镜和镜架的质量。
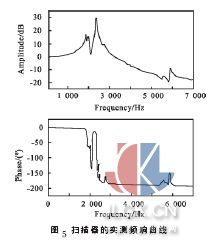
由公式(2)可以看出:增大铰链中心距、增大压电驱动器和弹性铰链的刚度可以增大角自振频率,但这样同时会减小最大扫描角度,因此,需要综合考虑。使用ANSYS 有限元分析软件对扫描器进行了模态分析。分析得出:其前3 阶固有频率为1 950 Hz、2 092 Hz 和2 553 Hz。再用扫频的方法测试得出扫描器的实际频响曲线,如图5 所示,前3 阶谐振频率为1 872 Hz、1 960 Hz、2 364 Hz, 可以看出: 扫描器的模态比较复杂,在3 dB 带宽内大约有4 个模态,因此,要实现高频匀速扫描,必须想办法抑制机械谐振。
3 应用
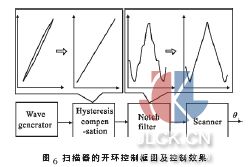
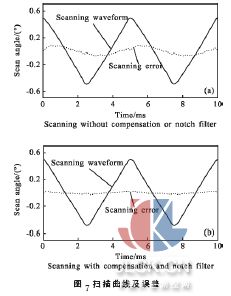
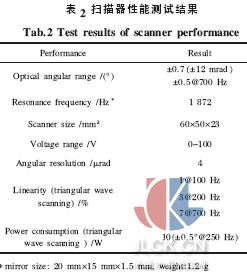
在激光雷达等应用中,通常希望激光光束为匀速扫描,即三角波扫描。三角波形含有大量高次谐波分量,这些高频成分会激发扫描器的谐振,严重影响扫描线性度。另外,压电陶瓷固有的迟滞效应也会明显影响扫描线性度。采用软件补偿和串联硬件陷波器[8]相结合的控制方法可以补偿迟滞效应和抑制谐振,有效提高扫描线性度,其开环控制框图和作用效果如图6 所示。先测试扫描器的低频三角波扫描波形,得到其迟滞曲线, 然后根据迟滞曲线对驱动波形进行修正,使修正后的扫描波形达到线性扫描,可以对修正后的驱动波形建立修正表,这样就可以补偿扫描器的迟滞效应影响。根据扫描器的振动模态和频响曲线,并分析实际扫描波形的频谱,发现对扫描线性度产生影响的主要为前三阶谐振频率,因此,在高压放大器前串联三级硬件陷波电路,其陷波中心频率分别对应扫描器前三阶谐振频率,实验证明:该方法可以有效抑制扫描器机械谐振,提高扫描线性度。由图6 可以看出:补偿迟滞效果和抑制谐振的效果很明显。分别测试了不加补偿和陷波器、加补偿和陷波器两种情况下的三角波扫描波形,扫描频率为200 Hz,光学扫描角度为±0.5°,扫描曲线和误差如图7 所示。可以看出:采用补偿和陷波器后,最大误差从0.085°减小到了0.03°,扫描波形中间85%的区域线性度优于1%。在基于位敏探测器(PSD ) 和Lab VIEW 的测试平台上,对扫描器进行了一系列性能测试,测试结果如表2 所示。可以看出:该扫描器具有转动惯量低、体积小、功耗低等优点。
4 结论
文中的激光扫描器采用了新型的位移放大压电驱动结构,比传统压电扫描器扫描的角度大,新型的弹性外框式位移放大结构具有比传统杠杆式结构更高的固有频率,更适合高频动态应用。扫描器采用软件补偿和串联硬件陷波器相结合的开环控制方法,补偿压电陶瓷迟滞效应影响和抑制机械谐振,提高了扫描线性度,实现了高速一维三角波光束扫描。该扫描器已用于激光雷达光束高速扫描。激光雷达扫描机构由两部分组成: 一个转台扫描反射镜实现大视场扫描,文中的压电扫描器实现高速亚视场扫描。该扫描器采用的压电陶瓷器件的最大伸展次数在5×109 量级,如果以200 Hz 扫描,可以连续工作约7 000 h。用闭环控制方法可以达到更好的扫描线性度和扫描控制精度,但是由于扫描器的模态比较复杂,要实现高频率三角波扫描闭环控制难度很大,这将在以后的工作中继续研究。
摘自:中国计量测控网






