首页>技术中心>技术资讯>基于CCD 的微缝宽激光测量系统的改进
基于CCD 的微缝宽激光测量系统的改进
发布时间:2017-09-01
引言
传统的微缝宽度是通过直接投影等方法实现的,但由于该方法不能适应产品质量和生产效率的要求,已趋于淘汰。取而代之出现了一种精度更高, 自动性更强的基于CCD 的非接触式衍射法测量微缝宽度的理论, 但在实际应用中由于测量距离的不确定性, 激光经微缝衍射后产生的衍射图样微弱, 信号的信噪比很低, 衍射图形的锐度不大, 光敏元响应不均匀及杂散光的干扰等因素, 给精密测量带来很多困难, 而且用单线阵CCD 对条纹间距的正交对准有一定的困难, 用面阵CCD 又比较昂贵。基于上述问题, 下面是对该系统装置的改进及精度分析。
1 系统改进原理
1.1 系统测量光学原理
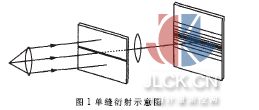
当激光束通过被测微缝后, 形成单缝夫琅和费衍射,如图1 所示。
根据夫琅和费衍射公式, 衍射图样上任意点P 的复振幅为:

式中z 是微缝边缘与中心点之间的位相差, 该差值决定了衍射条纹光强, 当衍射图样为极值时, 其位相差应该满足z=atanθ=2mπ。这样就得到半径的计算公式:
式中ak 为衍射图样中第k 级衍射环的半径; λ为激光波长; l 是衍射微缝至衍射图样的距离; m 是贝塞耳函数的零点值, 当衍射环级数确定时, 该值为常数。为避免衍射距离对测量结果的影响, 上述公式还可写成一个用增量形式表达的公式:
因此, 只要确定衍射距离改变量和同级衍射条纹距离的改变量即可求出微缝的宽度。
1.2 系统测量原理
整个测量系统是在导轨上进行的, 线阵CCD1 与CCD2 分别位于分光棱镜的两个出射面上, 并且两线阵CCD 互相垂直放置, 中心与主光轴重合, 组成正交线阵CCD。展开光路后两个线阵CCD 即等价于两个同面、正交的线阵CCD, 构成于一个正交坐标系。两正交及两分光镜都固定在导轨上, 原理如图2 所示。
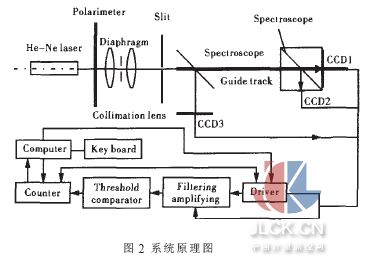
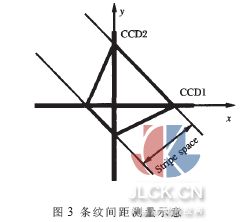
由He- Ne 激光器发出激光束, 经偏振片进入准直透镜组, 扩束成平行测量光, 其中小孔光阑起空间滤波作用。准直扩束后光线经被测微缝产生衍射, 衍射光束经分光镜分成两束光分别成像在正交CCD 组及CCD3 上面, 其中一束分别和CCD1 与CCD2 相交, 即可从CCD1 和CCD2 得到衍射环与CCD 的四个交点坐标( 如图3 所示) , 所得数据经计算机计算后可得出特定衍射条纹间距。而CCD3 用于测量任意衍射条纹位置。当测量系统轴向移动到导轨另一位置后, 得到移动后新的特定条纹间距, 并计算出移动前后两次间距差Δak , 而CCD3 测量的同级条纹与原位置的差值, 即为导轨移动距离Δl, 代入公式( 8) , 得到被测微缝宽。
2 系统精度提高分析
2.1 Δl 的确定
传统的测量方法一般是根据公式( 7) 来完成的,由于公式中微缝到测量CCD 的距离l 对微缝宽测量精度的影响非常大, 而传统方法往往由于微缝位置的不确定性, 使l 具有很大的不确定性, 给最后的微缝宽测量带来较大误差。系统改进后采用公式( 8) 进行测量, 通过测量系统在导轨上的移动, 再经CCD3 对衍射条纹的测量得到l 的变化量Δl, 这样测得的微缝宽的误差与Δl 的误差成正比。而根据系统结构, Δl的误差非常小( CCD 像元级) , 而系统采用CCD 像元尺寸仅为0.007 mm, 使最终测量精度得到大幅提高。
2.2 改用正交线阵CCD 作为接收元件
传统的测量方法是以单线阵CCD 或面阵CCD作为接收元件的, 这样对CCD 的定位就非常严格, 即CCD 必须与条纹严格正交, 但由于缝宽位置的可变性, 做到这一点非常困难, 势必给系统带来误差。而如果使用面阵CCD 作为接收元件又相当昂贵, 因此系统改进后用正交的线阵CCD 作为接收元件, 测量时CCD 无需严格正交, 衍射光束经分光镜分成两束光其中一束分别与CCD1 和CCD2 相交, 即可得到衍射环与CCD 的四个交点坐标, 所得数据经计算机处理后可得出特定衍射条纹间距, 操作简便。
2.3 E 取向对微缝宽度测量精度的影响
实验和理论证实: 衍射法测缝宽存在着偏振效应。采用偏振激光和非偏振激光会给微缝宽的高精度测量带来不可忽略的误差[3]。为了满足远场夫琅和费衍射条件, 测量系统使偏振度降低。因此, 测量系统中的起偏振镜组( 如图2 所示) 提高了投射到被测微缝上的激光的偏振度, 并便于选择恰当E 取向, 用以消除因非线偏光或E 的不同取向所带来的误差。
2.4 其他因素影响
He- Ne 激光器的波长误差主要取决于激光器的波长稳定性, 即频率的稳定性。而目前He- Ne 激光器的频率稳定度可达2×10- 12 以上, 所以, 从理论上讲, 波长可以达到0.01 nm, 误差极小。
由于系统采用线阵CCD 接收并测出与衍射条纹交点坐标值, 因此CCD 像元的大小会影响测量的精度。利用高灵敏度的线阵固态CCD 传感器接收激光束衍射条纹来标定交点坐标值, 其像元尺寸为0.007mm, 光谱响应范围在0.4~1.2 μm 之间( 属可见光及近红外范围) 具有2 048 个像元, 因此正交线阵CCD测量装置是通过测量大尺寸的条纹来计算得到小尺寸的微缝缝宽, 因而这种影响是很小的。
3 系统实验及结论
基于上述理论和实验依据对测量系统改进, 使非接触激光微缝宽测量装置在10~120 μm 测量范围内,测量误差为0.1~0.5 μm。表1 是一组系统对标称值为60 μm 的漆包线的实测数据。
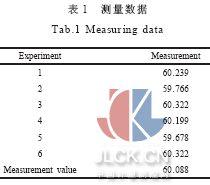
依据贝塞耳公式根据公式( 8) 可计算得到系统实验的标准偏差:
系统性能稳定, 测量过程实现了非接触、高精度在线测量。
摘自:中国计量测控网






