一种摄像系统定量评定方法
发布时间:2017-09-01
一、引言
在利用数字图像进行光学精密测量时,为了消除摄像系统中存在的各种误差,就需要对摄像系统进行高精度标定。对由视频输出CCD摄像机和图像采集卡组成的摄像系统来讲,一般都认为其几何重复性能良好,通过测量前的标定即可完成对后续测量拍摄图像的校正。但是由于视频数字化过程中存在误差,可能会破坏图像的几何重复性。因此,标定后的摄像系统的评定也就成了一项重要的工作。
本文首先分析了摄像系统中的主要误差来源,然后基于对摄像系统的高精度标定,提出了一种摄像系统定量评定的方法。
二、摄像系统误差源分析
一般摄像系统多采用的是常规工业用CCD摄像机,其输出为标准视频信号,通过图像采集卡来完成图像的采集。这种摄像系统存在的主要误差有以下四种[1]:
1.光学镜头畸变
由于普通摄像机镜头在加工、安装和调试过程中难免存在一定的残余像差,如球面像差、彗星像差、像散、像场弯曲和畸变像差等轴对称像差及不对心像差和薄棱镜像差等非轴对称像差。存在的残余像差会引起镜头的畸变,畸变主要包括径向和切向畸变误差。镜头焦距越短则镜头畸变越大,越靠近镜头边缘,畸变误差越大。镜头畸变同时也与拍摄时的镜头光圈数F相关,F越小,畸变越大,因此应尽量选取大光圈数F来进行拍摄。
2.CCD传感器阵列像元几何误差
CCD芯片中的阵列像元排列不规则、位置偏差、尺寸大小误差及阵列轴的不垂直性误差等统称为阵列像元几何误差。这项误差主要取决于CCD芯片生产厂家的加工技术和工艺水平。
3.传感器和电路随机噪声
主要是由电子器件和电路产生的各种噪声。一般通过图像预处理来消减噪声的影响,如多图平均法和各种滤波的方法。
4.视频转换误差
视频转换误差主要包括行同步误差、场同步误差、采样间隔误差和帧同步误差。由于标准的视频信号,如PAL、NTSC都是2:1的隔行扫描,一帧图像由奇偶两场图像组成。图像采集卡要正确进行图像采集,就要对模拟视频信号中的场同步脉冲信号和行同步脉冲信号进行准确定位。由于同步信号定位误差引起了图像的行间错动和场间错动。同时,由于采样时钟频率不稳定而引起了采样间隔误差,以上三种误差统称为行抖动误差。由于一帧图像由奇偶两场组成,因此两帧图像之间由于同步的误差而引起了帧同步误差。行抖动误差和帧同步误差是视频转换过程中的主要误差。
由数字式摄像机和采集卡组成的摄像系统具有感光像元点和像素点的几何唯一对应性,因此不存在视频信号转换误差。
三、摄像机系统的标定
CCD传感器阵列像元素几何误差主要影像图像点的灰度值,此外CCD传感器阵列轴的不垂直畸变误差修正可以统一到光学镜头畸变修正中。视频转换误差属于硬件的随机系统误差,是一种不确定的误差来源,只能根据具体图像卡来进行修正。因此摄像机系统的标定工作主要是对光学镜头畸变进行修正。
摄像系统标定的步骤为:首先拍摄标定网格板图像并提取网格节点;然后利用中间区域网格节点拟合理想网格场,用网格节点处的误差求解镜头畸变模型;最后对图像进行修正。
标定物采用标准正交网格板,网格线间距为1mm,网格线刻制精度为0125Lm。拍摄时尽量使网格平面与摄像机光轴垂直。下面对网格节点提取、镜头畸变模型求解和畸变修正进行简要介绍:
1.网格节点提取
由于网格节点是规则的几何图形,因此可以构造理想模板,用相关法来进行网格节点提取。理想模板可由下式产生[1]:

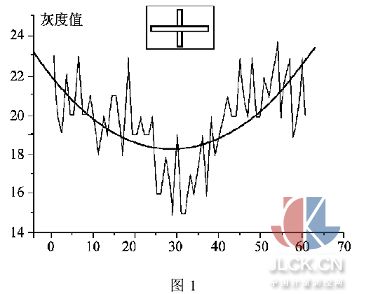
其中,是控制图像点灰度的参数,WM是用距离对灰度值进行加权的参数,C是目标对比度,即节点中心与背景的灰度差。根据实际网格节点的灰度分布可以确定上式中的参数。图1中的细实线为某条网格线上的灰度分布曲线,粗实线是理想网格线的灰度分布曲线。
网格节点高精度提取算法主要有亚像素插值法[2]和相关系数拟合法[3]两种。由于相关系数拟合法的计算效率和抗噪声能力要优于亚像素插值相关法,因此本文采用相关系数拟合法来提取网格节点,并用加入高斯分布随机噪声的网格仿真图像来检验相关系数拟合法的精度。网格仿真图像由式(1)生成,其中参数选取为C=200, WA=2, WM=10。对于噪声均方差RN=5、10、15和20灰度值的网格仿真图像,用相关系数拟合法提取网格节点精度的均方差如表1所示。
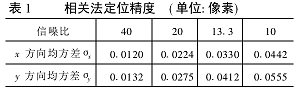
由表1可知:当图像信噪比SNR(SNR=C/RN)大于20时,相关系数拟合法提取网格的精度优于0103个像素。
2.镜头畸变模型求解
考虑到镜头的各种畸变误差,建立如下的多项式畸变误差模型[3]:
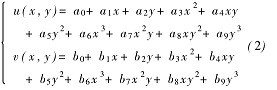
其中,u和v分别为图像行方向和列方向上的镜头畸变,x和y为图像坐标值,单位为像素。
由于可认为镜头中心部分畸变像差极小,甚至可以认为无畸变的,用该区域的网格节点坐标拟合一个理想正交网格场。将该理想正交网格场与提取出的网格场相比较,便可以得到相应网格节点处的畸变[4]。由于网格节点的个数大于摄像机畸变误差多项式的项数,因此可以通过最小二乘法求解出式(2)的系数。
3.镜头畸变修正
图像畸变修正包括两个步骤:空间坐标变换和灰度插值。由于对整个图像进行修正的计算量较大,因此一般只对提取的目标点坐标进行修正。
用畸变模型对网格图像进行修正后,实际图像网格场与拟合理想网格场仍然存在一定的误差。这个误差可用网格节点坐标残差的均方差Rx和Ry来衡量。Rx和Ry由式(3)确定[4]:
其中(xij,yij)和(xij,yij)分别为实际网格节点坐标值和拟合理想网格节点的坐标值。
四、摄像系统的定量评定
标定后的残差均方差分为两类:自标定残差均方差和互标定残差均方差。其中自标定残差均方差是指摄像系统标定所用网格图像的网格节点残差均方差;而互标定残差均方差是指其他网格图像的网格节点残差均方差(由于也可以用后一幅网格图像得到的镜头畸变模型对前一幅图像进行标定,因此本文定义该误差为互标定残差均方差)。这两种残差均方差都是衡量摄像系统标定精度的重要指标。自标定残差均方差可以表明畸变模型求解的正确性,而互标定残差均方差则可以确定测量系统的实际测量精度。
由于互标定残差均方差的计算过程与实际测量过程类似,因此可以用来进行摄像系统的定量评定。下面对三种实际摄像系统进行定量评定。
三种摄像系统的组成分别如下:
(a)Panasonic WV-BP310/G型号CCD摄像机和大恒CG200图像采集卡;
(b)Panasonic WV-BP310/G型号CCD摄像机和NI-1408图像采集卡;
(c)Pulnix TM-1300数字式CCD摄像机和DT3517数字接口卡。
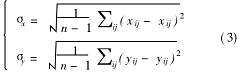
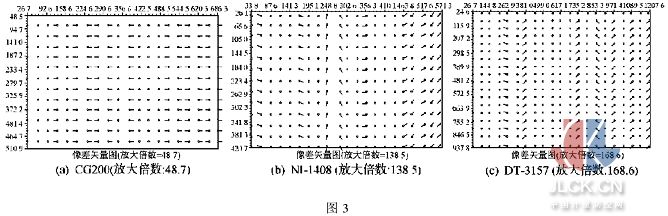
三种摄像系统的自标定残差均方差和互标定残差均方差见表2。图2(a)、(b)分别为摄像系统(c)的镜头畸变误差和畸变拟合误差的等值线图。图3和图4分别为三种摄像系统的自标定残差和互标定残差矢量图。

对图表数据分析可知:
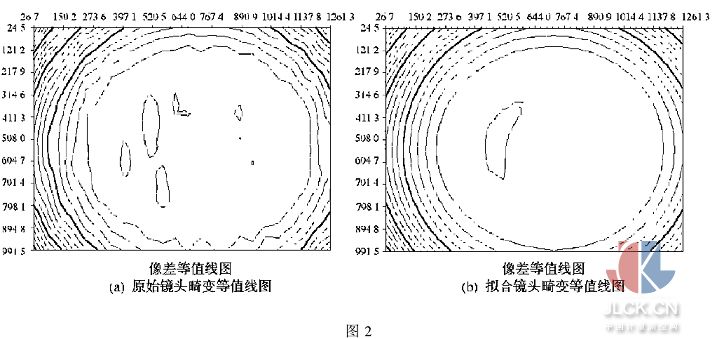
(1)x方向的自标定残差和互标定残差均大于y方向上的相应残差,这是因为图像行和CCD行严格对应的缘故;
(2)摄像系统(a)的自标定残差较大是因为CG200图像采集卡的行同步性能较差而引起;
(3)摄像系统(b)的互标定残差较大是由NI-1408图像采集卡的帧同步性能不好而造成的。这一点由图4(b)可以看出;
(4)摄像系统(c)采用了数字式摄像机,避免了视频信号转换误差,因此精度最高。
由上述的实验结果可以看出,用互标定残差进行摄像系统的定量分析是可行的。
由于视频转换误差是属于系统硬件误差,并且对于不同的图像采集卡其误差表现形式不同,难以用统一的方法进行修正。因此只能在了解摄像系统误差类型的基础上,通过图像处理方法对特殊情况进行相应的修正。例如:对于点、圆和矩形等规则几何物体的定位,可采用形心法,重心法,矩方法等亚像素方法来克服行抖动误差的影响;对于与图像行方向夹角较大的直线定位,可首先在图像行方向上进行一维边缘检测,然后拟合的方法来确定直线;对于帧同步误差较大的摄像系统只能通过尽量选取图像中心部分作处理来减少目标定位误差。
五、结论
本文以摄像系统高精度标定为基础,提出了利用互标定残差均方差进行摄像系统定量分析的方法。通过对三种摄像系统进行定量评定的实验验证了该方法的可行性。
摘自:中国计量测控网






