智能控制算法在杂交仪开发中的应用
发布时间:2017-09-01
引 言
现代生物技术、信息技术、新材料和新能源技术并列成为影响国计民生的四大科学技术支柱,是21 世纪高新技术产业的先导。生物工程的基础是生物试验。杂交润洗过程是很多生物实验都有的共同步骤,其过程往往比较烦琐费力,而且耗时比较长,有的实验甚至长达几十个小时;而且该实验温度控制比较困难,实验的每一步骤液体种类和体积都不一样,升温过程和降温过程的曲线也完全不同。面对这样的控制对象,普通 PID 算法难以达到实验要求的精度。
某智能杂交实验仪基本的机械结构如图 1 所示。实验结果表明,控制对象并不是一个简单的线性对象,而是一个带延迟环节、阶段连续的时变二阶对象。
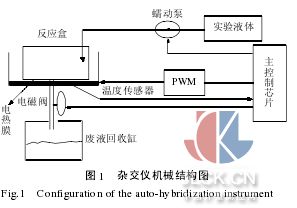
蠕动泵负责各种实验液体的输送;电磁阀控制排液,某步骤实验结束时废液排入废液回收缸;电热膜用于加热反应盒,保持实验液体一定范围内的温度;利用温度传感器 AD590 进行测温,信号输入到主控制芯片进行 A/D 转换;温度控制方式采用脉宽调制方式(PWM)。
1 温度控制算法研究
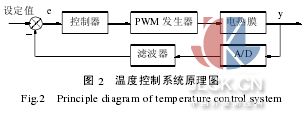
在杂交实验过程中,反应温度必须严格控制在设定温度的±0.5℃之间,这样实验结果的可信度才比较高。而杂交实验的温度控制系统是一个随动控制系统(设定值是变化的)和自动调节系统(被控量在设定值附近变化)的综合,如何在这样的复合控制系统中保证温度的控制精度是必须研究的。在工业过程控制中,往往是等被控量进入了某一范围之后才能投上 PID 控制,而且 PID 的初值选取也是一个不容易解决的问题。这就要求研究一些新的控制算法来确定 PID 初值,及如何让被控量尽快地进入 PID 的调节范围并防止超调。温度控制原理如图 2 所示。通过不停地调整 PWM 的占空比来改变电热膜的通电时间,达到控温的目的。
1.1 预补偿 PID 控制算法
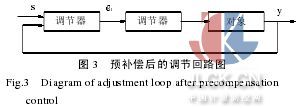
PID 调节是通过对其输入被控量的偏差进行比例、积分、微分运算而得到控制输出量的。对大惯性对象来说,当被控量偏差刚刚出现时,偏差值很小,但扰动已作用多时。此时常规 PID 调节器往往不能及时调节,造成调节品质下降。根据被控量的大小和其变化速率、方向以及时间关系,将调节器输入的被控量的偏差先行进行预补偿运算,得到新的偏差值后,再经过常规 PID 运算获得新的控制方法。这种预补偿运算关系可根据被控对象特性和控制要求来确定。图 3 给出了预补偿后的调节回路图。
预补偿环节的偏差1与被控量的偏差 e 之间关系如图 4 所示。用函数表示为1=f (e)。图中虚线为1=e 线。当偏差值 e 为正且向增大方向变化时,1沿曲线 oiA 进行预补偿;当偏差值为正且向减小方向变化时,1沿曲线 Ado 进行预补偿;当偏差值为负且向增大 (绝对值) 方向变化时,1沿曲线 omB 进行补偿;当偏差值为负且向减小 (绝对值) 方向变化时,1沿曲线 Bno 进行补偿;当偏差值不变化时,e=1。
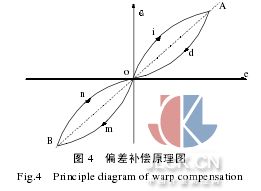
基于上面原理,令 = 1 ,可采用如下的补偿方法:1= + 。上式算法简单,易于在单片机上实现。在输出y 偏离设定值时, >0,补偿后||>| |;输出 y正在跟踪设定值时, <0,补偿后|1|<| |;输出值不变化时, =0,补偿环节不进行补偿,|1|=| |。
图 5给出了采用预补偿PID控制算法的实验过程中,某步骤多次循环中的 4 次循环温度响应曲线。
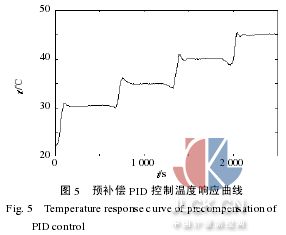
由图 5 可以看出,采用预补偿 PID 算法获得了较好动态性能,超调基本上控制在 1℃左右,调节时间控制在 90 s 左右;静态偏差控制在±0.2℃以内,能够很快地跟踪设定值。在一个实验步骤结束后,系统要进行换液排液,PWM 停止输出,所以出现温度下降的趋势。虽然实验的对象已经发生了变化,但是其动态性能并没有出现大的波动,呈现出了较强的鲁棒性,所以非常适合于控制分阶段连续时变对象。但其初值的选择较难确定,只能靠经验。
1.2 模糊控制算法
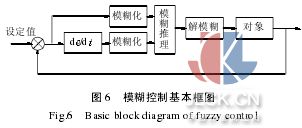
与传统控制理论相比,模糊控制有两大不可比拟的优点:模糊控制在许多应用中可以有效且便捷地实现人的控制策略和经验;模糊控制可以不需被控对象的数学模型即可实现较好的控制,因为被控对象的动态特性已隐含在模糊控制器输入、输出模糊集及模糊规则中。模糊控制算法实际上是一种基于规则推理的计算机控制算法,具有数字控制系统的一般结构,通过偏差和偏差的变化率来对对象进行控制,其常用组成如图 6 所示。
1.2.1 模糊控制算法的实现
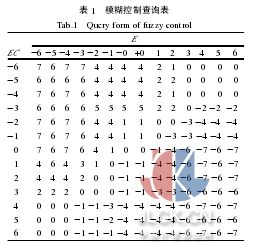
模糊控制算法有多种实现形式。在单片机实现的模糊控制系统中,常采用查表法,即事先制造模糊控制响应表,在软件设计时将该表格事先置入内存中供实时查表使用。在实际控制时,模糊控制器首先把输入量量化到输入量的语言变量论域中,再根据量化的结果去查表求出控制量,这样可大大提高模糊控制的实时效果,节省内存空间。这种方法的特点是首先求出模糊关系 R,再根据输入的偏差和偏差变化率利用合成推理方法求出模糊输出量,最后经过反模糊化可把模糊量转化为精确量,即可得到控制量。
在实际应用中,对各种 E 和 EC 的组合情况进行离线计算得到相应的控制量,从而得出如表 1 的模糊控制查询表。
1.2.2 模糊控制效果分析
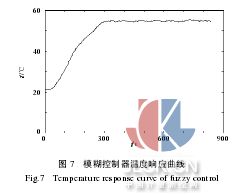
把上述的模糊控制查询表 1 存入 C8051F005芯片的 FLASH 存储器中,实验的对象是 45 mL 的液体,加热对象是封闭式盒子,温度测点选在实验液体上方。使用该模糊控制器所得到的温度响应曲线如图 7 所示。由图可知,模糊控制器的响应时间是比较快的,但它并不能消除稳态偏差,在上述条件下其稳态偏差大约为 0.45℃,而且存在一定程度的波动,其精度和鲁棒性均不如预补偿 PID 控制算法。因此只用模糊控制算法还达不到实验所要求的控制精度。
2 智能控制算法
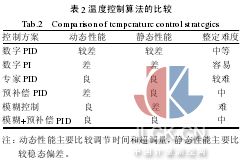
在对生物杂交实验的液体温度控制中,各种控制方案优缺点比较如表 2 所示。
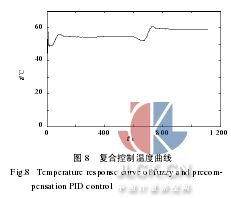
为了能充分利用模糊控制和预补偿 PID 控制方法的优点,可以在大范围内选用模糊控制,提高系统的响应速度和鲁棒性,而温度接近设定值时选用预补偿 PID 控制方案,提高了系统的静态性能。这种复合控制的温度响应曲线如图 8 所示,是实验过程中某两步切换时的温度响应曲线。从图 8 可以看出,温度响应速度较快,超调量较小,对象发生改变时系统能很快地到达新的平衡,静差控制在 0.15℃以内,几乎没有振荡,因此这种控制方案非常适合于杂交实验过程中的带迟延、阶段连续的复杂时变对象的控制。
这种复合控制方法的整定并不复杂:由于模糊控制只负责大范围的控制,所以其论域没有必要选得太多,一般分成 3 档即可,可以解决预补偿 PID的初值问题;预补偿 PID 只选用 PI 算法即可,不仅能达到所要求的精度,更使得控制参数易于整定。
综合比较各控制方案的动态性能、静态性能、整定难度,并经过试验证实,本文选取的大范围内采用模糊控制,小范围内采用预补偿 PID 控制的复合控制方案效果良好,达到了实验温度控制精度的要求,参数整定也比较容易。
3 结 论
杂交实验是一个复杂的缓慢反应过程,各步骤间液体的种类和设定温度都有可能变化,如何精确地控制实验液体温度是自动杂交仪开发的难点。本文针对这种状况,在研究温度的精确控制过程中,提出了一种大范围内采用模糊控制,小范围内采用预补偿 PID 控制的新型复合控制算法。实验结果表明,该算法对这类阶段连续、有迟延的时变控制对象是非常有效的。由于模糊控制只负责大范围内调节,所以其论域分档可以选得少一些,使得系统整定更方便。该复合算法程序简单,很容易在单片机上实现,具有一定的推广价值。
摘自:中国计量测控网






